
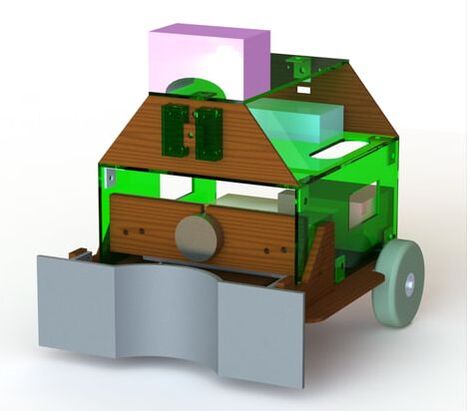
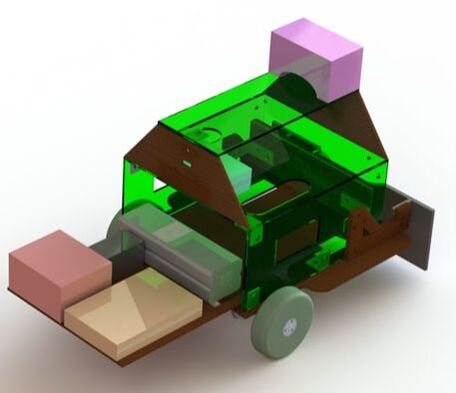
Rendered CAD Model of Big Bird
|
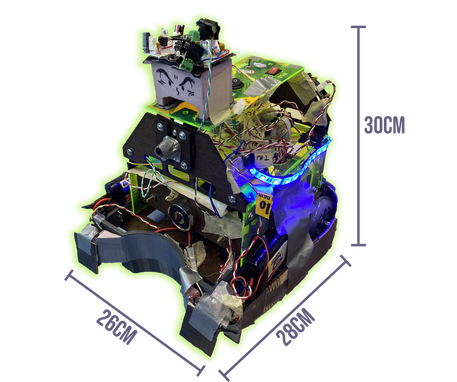
Actual Big Bird bot
|
Overview
Big Bird's main mission objective is to maximize mining time on Mars. To achieve this goal, Big Bird uses a MINER Acquisition and Relocation unit composing of a curved bumper and electromagnet. Big Bird's drivetrain and bumper are designed for robustness. Big Bird is designed to fit within a 30 x 30 x 30 cm cube so that it's eligible for free Two Day Amazon Prime delivery to your nearest space outpost.
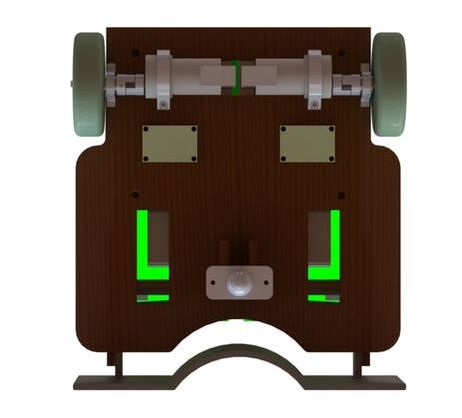
Rendered Image of Big Bird's Drivetrain
|
DrivetrainBig Bird's drivetrain uses two independently driven wheels mounted at the back of the robot with a caster wheel in the front for stability. The two drive motors are screwed to the base via a motor mount, and coupled to a longer shaft with a spider shaft coupler, and run through a pillow block to prevent horizontal loading on the motor shaft. The wheels are mounted via a press-fit hub onto the driveshaft, and held in place with a shaft collar. Mounted on the innermost ends of each motor is an encoder and magnet pair to measure distance traveled and to provide feedback for proportional-integral drive control.
|
BumperTo prevent Big Bird from damaging other TRACTORS or the Mars simulation field walls, Big Bird uses four limit switches to sense collisions: two in the front on either side of the curved MINER acquisition plow, and two in the rear of the vehicle. All four limit switches are mounted to the base at the same height, and covered by an aircraft plywood bumper which wraps around 3/4 of the vehicle in order to trigger the limit switches from any angle, as well as to protect the sides and back of the vehicle from damage during collisions. The wooden bumper has a lasercut pattern where it covers the corners of Big Bird in order to allow the material to curve smoothly around the corners for a seamless bumper.
|
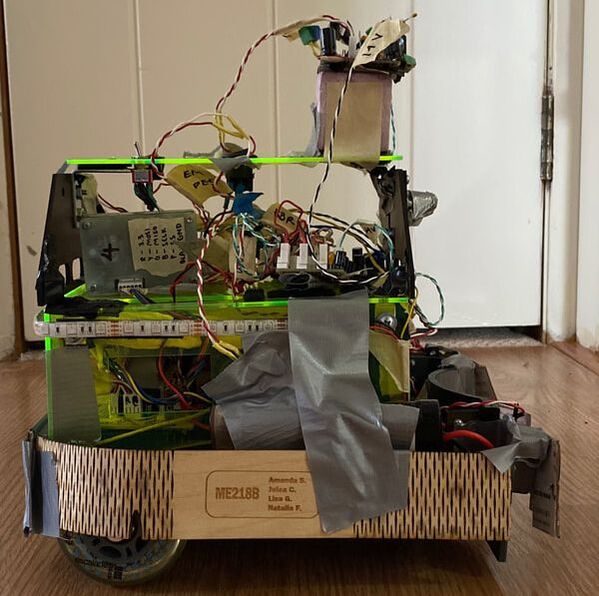
Image of Big Bird's Wooden Bumper Cover
|

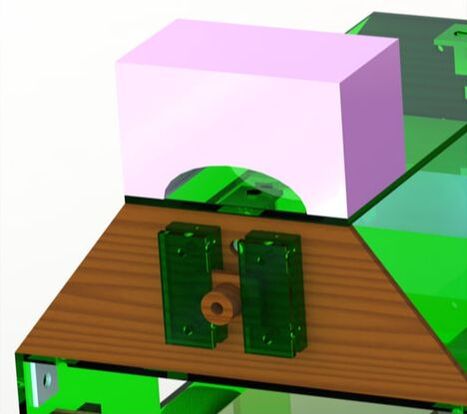
Rendered image of Big Bird's MINER Acquisition Subsystem
|
MINER AcquisitionBig Bird uses a custom 3D-printed curved "plow" to guide the MINERs into place against the front of the vehicle while the vehicle is moving forwards towards it.The plow is attached to the side walls of Big Bird with two Duron arms, mimicking a tractor. As the MINER pushes against the front plow, an IR beam across the front of the vehicle is broken by the MINER body, allowing Big Bird to detect its presence. When Big Bird senses the MINER in place, it turns on an electromagnet which contacts the upper lip of the MINER when it is in place, holding it securely in order to allow Big Bird to freely back up and turn to bring the MINER to a permitted location.
|
IR Beacon DetectingIn order to detect the location of the MINERs on the field, Big Bird uses a IR photo transistor mounted at the exact height of the IR LEDs that are mounted on top of the MINERS. In order to ensure a clear and straight signal detection, the photo transistor is mounted to a Duron casing against the front of Big Bird, which is held in place by two acrylic plates against the front Duron face. This configuration allows for small height adjustments to be made to the detector to more precisely target the MINER LEDs. The photo transisor is additionally encased in a Duron cylinder in order to prevent stray signals from other MINERs from interfering with the signal detection from the target MINER. The IR detection circuit is mounted on a tower in order to be as far away as possible from noise-inducing circuits and wires in the vehicle.
|
Rendered Image of Big Bird's IR Beacon Detection Subsystem
|
Rendered Image of Big Bird's Electronics Tray
|
Electronics TrayIn order to allow for quick and easy re-adjustment of electronic circuits on big Bird, the majority of the perforated circuit boards and other hardware were placed on either the inner electronics tray or on the exposed top layer. The electronics tray is fully removable, and can slide out of the rear of the main body. The majority of the electronics are mounted to his and the upper surfaces via adhesive, velcro, and screws.
|
